|
Le ricerche sull’Intelligenza Artificiale stanno
attraversando un periodo rivoluzionario. Occorre, prima di procedere, fare delle
considerazioni storiche sull’IA per poi valutarne i limiti ed i confini.
Teoria della computazione
Alla domanda "Può una macchina pensare?" diversi
teorici hanno fornito nel tempo molte ragioni per dare una risposta affermativa. Una delle
prime e più profonde stava in due importanti risultati della teoria della computazione.
La prima è la tesi di Church, secondo cui ogni funzione che sia effettivamente
calcolabile è ricorsivamente computabile. Effettivamente calcolabile significa che
esiste una procedura "meccanica" per determinare, in un tempo finito, il valore
o l’uscita della funzione per un dato argomento od ingresso. Ricorsivamente
computabile significa in particolare che esiste un insieme finito di operazioni
aritmetiche elementari che, applicate ad un dato argomento e poi ai risultati successivi
di queste elaborazioni, consente di ottenere il valore della funzione in un tempo finito.
Macchina manipolatrice di simboli e test di Turing
L’altro risultato importante è la dimostrazione di Alan
Turing, secondo cui ogni funzione ricorsivamente computabile può essere calcolata
in un tempo finito da un tipo semplice di macchina manipolatrice di simboli, detta
successivamente macchina universale di Turing (MS). Essa è governata da un
insieme di regole applicabili ricorsivamente, in grado di considerare l’identità,
l’ordine e la disposizione dei simboli elementari in ingresso via via incontrati.
Questi due risultati comportano una conseguenza notevole: un calcolatore digitale
tradizionale, purché abbia il programma giusto, una memoria abbastanza grande e tempo a
sufficienza, può calcolare qualsiasi funzione tra ingresso ed uscita governata da regole.
In particolare, i risultati comportano che una macchina manipolatrice di simboli (MS)
adeguatamente programmata dovrebbe riuscire a superare il test di Turing per
l’intelligenza cosciente. Nella versione originale del test di Turing, ciò che si
introduce nella macchina MS sono domande ed osservazioni tipiche di una conversazione,
battute su una tastiera da una persona qualsiasi, mentre le uscite sono riportate
dattiloscritte, fornite dalla macchina MS. La macchina supera questo test per
l’intelligenza se le sue risposte non possono essere distinte dalle risposte
dattiloscritte di una persona umana. Naturalmente, al momento, nessuno conosce la funzione
che produrrebbe in uscita il comportamento di una persona pensante, ma Church e Turing
garantiscono che, qualsiasi sia questa funzione, una macchina MS adeguata potrebbe
computarla. Una tale conclusione è importante, soprattutto perché l’interazione
svolta solo mediante telescrivente ipotizzata da Turing è un vincolo superfluo.
Macchina manipolatrice di simboli e cervello
La stessa conclusione si ottiene anche se la macchina MS
interagisce con il mondo esterno in modi più complessi: mediante visione diretta, o con
dialoghi veri e propri ed altro ancora. L’unico problema che resta è quello di
identificare la funzione complessa che governa la struttura delle risposte umane
all’ambiente e poi scrivere il programma. Le macchine MS fornite di buoni programmi
svolgono un’ampia gamma di attività cognitive, seguono istruzioni complicate,
risolvono complessi problemi. L’Intelligenza Artificiale classica, basata sulla
stesura di programmi, ha rappresentato un complesso di ricerche impegnative e riuscite
sotto molti punti di vista. Naturalmente, vi sono lati oscuri. Intanto, è evidente che le
macchine MS non sono molto simili al cervello. Ma anche qui l’impostazione classica
fornisce una risposta convincente. Innanzitutto, il materiale con cui una qualsiasi
macchina MS è costruita non ha niente a che fare con la funzione calcolata, che è
fissata dal programma. In secondo luogo, anche i particolari costruttivi
dell’architettura funzionale della macchina sono irrilevanti, poiché architetture
differenti potrebbero determinare la stessa funzione ingresso-uscita. Di conseguenza,
l’Intelligenza Artificiale ha cercato di trovare la funzione ingresso-uscita
caratteristica dell’intelligenza ed il programma più efficace per calcolarla.
Agli inizi degli anni ’70, Dreyfus ha criticato le simulazioni dell’attività
cognitiva, giudicandole insufficienti rispetto alla realtà cognitiva ed imputava a queste
simulazioni un difetto sistematico. Ciò che mancava era il vasto cumulo di conoscenze di
base inarticolate che ogni persona possiede e la capacità di usare il buon senso per
sfruttare gli aspetti utili di tali conoscenze al mutare delle circostanze. Sempre in
questo periodo, il tasso di rendimento cognitivo comincia a diminuire all’aumentare
della velocità e della memoria. Per simulare il riconoscimento degli oggetti da parte del
sistema visivo, si deve ricorrere ad una potenza di calcolo di livello inaspettato. I
tempi di calcolo sono sempre più lunghi, molto di più di quelli richiesti da un sistema
visivo reale. Tale lentezza è incomprensibile, poiché in un calcolatore la propagazione
dei segnali è un milione di volte più veloce che nel cervello, ad una frequenza di clock
di centinaia di Mhz. Eppure, nei problemi reali, la tartaruga supera la lepre.
Negli anni ’80, John Searle ha concepito una critica abbastanza nuova, indirizzata
all’assunto di fondo del programma di ricerca classico: ovvero, l’idea che una
manipolazione adeguata di simboli strutturali tramite l’applicazione ricorsiva di
regole che tengano conto della struttura possa produrre un’intelligenza cosciente.
Searle si basa su un esperimento concettuale avente due caratteristiche fondamentali. In
primo luogo, la macchina MS deve attuare una funzione ingresso-uscita capace di sostenere
una conversazione superando il test di Turing. In secondo luogo, la struttura interna
della macchina è tale che, comunque essa si comporti, un osservatore abbia la certezza
che né la macchina, né alcuna sua parte capisce il linguaggio discorsivo.
Tutto ciò che la macchina contiene è una persona che parla solo l’inglese e che
seguendo una serie di istruzioni scritte manipola i simboli cinesi che entrano ed escono.
In breve, il sistema dovrebbe superare il test di Turing, pur non comprendendo né il
cinese né il vero contenuto semantico del cinese. La conclusione generale di Searle è
che un sistema che si limiti a manipolare simboli fisici che tengano conto della struttura
sarà al massimo una vuota parodia dell’autentica intelligenza cosciente, poiché è
impossibile generare la vera semantica semplicemente macinando una vuota sintassi. Gli
elementi dell’intelligenza cosciente devono possedere un contenuto semantico reale.
Nuove tendenze dell’IA verso
Emulatori che riproducano il funzionamento del cervello
Il problema dell’intelligenza cosciente rimane irrisolto
secondo le linee di ricerca dell’IA classica. L’architettura funzionale delle
macchine MS classiche non è adatta a svolgere compiti molto impegnativi.
Le nuove tendenze dell’IA sono rivolte alla conoscenza approfondita del cervello
biologico ed alla costruzione di una nuova classe di modelli computazionali che si
ispirano alla sua struttura. Sono soprattutto due le caratteristiche anatomiche per cui il
cervello si differenzia profondamente dall’architettura dei calcolatori elettronici
tradizionali.
In primo luogo, il sistema nervoso è una macchina parallela, nel senso che i segnali sono
elaborati simultaneamente in miliardi di canali diversi. La retina, ad esempio, presenta
al cervello il suo complicato ingresso non in blocchi di 8, 16 o 32 elementi, come in un
calcolatore da tavolo, bensì sotto forma di quasi un milione di segnali distinti che
arrivano simultaneamente all’estremità del nervo ottico, il nucleo genicolato
laterale, dove vengono elaborati collettivamente e simultaneamente.
Strutture parallele
I modelli a rete semplificati sono utili per capire come
potrebbero funzionare le reti di neuroni reali e per rilevare le proprietà
comportamentali delle architetture parallele. In una rete a strati dove ogni neurone di
uno strato è collegato a tutti i neuroni dello strato successivo mediante
assoni, uno
stimolo in ingresso produce un dato livello di attivazione in una certa unità di
ingresso, la quale mediante il suo assone trasmette alle molte connessione sinaptiche che
collegano le unità nascoste un’adeguata frequenza di segnali proporzionale al
livello di attivazione. L’effetto complessivo è che un fronte di attivazione
nell’insieme delle unità di ingresso produce un fronte di attivazione
nell’insieme delle unità nascoste. Un fronte di attivazione delle unità nascoste
produce un fronte di attivazione perturbato dal proprio stato nelle unità di uscita. Il
fronte di uscita è oramai diverso, avendo subito, nel passaggio, una modifica.
"L’elaborazione", in questo caso, è una propria e vera
"trasformazione". Il messaggio trasmesso dalla trasformazione del fronte è una
sorta di "firma" dell’istante-processo.
Vantaggi di una struttura parallela
rispetto al calcolatore
Per quanto semplifichi la struttura del cervello, il modello a
rete presenta notevoli vantaggi importanti.
Innanzitutto, un’architettura parallela consente un aumento radicale di velocità
rispetto ad un calcolatore convenzionale, perché le numerose unità, per ogni strato,
compiono molte piccole operazioni simultanee invece che in faticosa successione. Questo
vantaggio aumenta di importanza quando il numero di unità di ciascuno strato aumenta.
In secondo luogo, un elevato grado di parallelismo comporta che il sistema resista ad
eventuali piccoli danni mantenendo la propria funzionalità. La perdita di alcuni
collegamenti ha un effetto trascurabile sul carattere della trasformazione complessiva
dalla parte rimanente della rete.
In terzo luogo, un sistema parallelo immagazzina grandi quantità di informazione in modo
distribuito.
L’elaborazione parallela non è l’ideale per ogni tipo di calcolo. Con
operazioni che richiedono soltanto un piccolo vettore in ingresso, con poche componenti,
ma molti milioni di calcoli ricorsivi in rapida interazione, il cervello, come struttura
parallela, lavora molto male, mentre le macchine MS tradizionali eccellono.
Esiste tuttavia un’altrettanta estesa classe computazionale per la quale
l’architettura del cervello è la migliore. Si tratta delle elaborazioni che in
genere devono affrontare gli esseri viventi, come ad esempio riconoscere la sagoma di una
persona in un ambiente disturbato, e ricordare successivamente ed all’istante la
sagoma stessa. Sono elaborazioni che presentano un numero elevato di ingressi, con
altrettanti canali, ma il risultato viene ottenuto con trasformazioni relativamente
semplici.
Il cervello non può essere considerato solamente come una semplice macchina parallela con
un elevato grado di architettura, ma anche sede dell’immaginazione e di memoria
pregressa derivante da tutti i sistemi sensoriali.
L’Enea verso la realizzazione di Olocontrollo Emulativo
L’Unità RIN di Frascati, nello stesso periodo, in stretta
collaborazione con Oberon srl ed altri, nell’ambito delle attività di Ricerca e
Sviluppo dell’Intelligenza Artificiale, iniziava ad idealizzare un modello di
architettura parallela delle macchine, che si avvicinasse maggiormente al funzionamento
delle macchine biologiche.
Ha preso così il via operativo lo svolgimento realizzativo di un progetto destinato a
riaprire, da principio, il discorso sull'automazione industriale, ed in prospettiva ad
oltrepassare i cancelli della fabbrica per invadere la vita di tutti i giorni nell'ambito
dei servizi e delle utilità sociali.
Si tratta della ricerca, dello sviluppo e dell'applicazione di una nuova "filosofia
tecnologica" che, avvalendosi delle nuove conoscenze neurobiologiche, ne riproduce
alcune capacità elaborative.
L’idea ha portato alla concretizzazione di Olocontrollo Emulativo, che nella attuale
fase di avanzamento ha prodotto numerose applicazioni industriali, quali macchine utensili
transfer a 44 assi, macchine laser ad alta potenza continua (Fincantieri e Riva
Techint),
macchine di manipolazione per montaggio e formatura (Ibs, Giuliani), sistema di controllo
ambientale via visione sintetica ("visio") per siti archeologici e musei
(Stacchiotti Impianti), dispositivo di supplenza percettiva per non vedenti
("visio"), ecc. Olocontrollo Emulativo, per mezzo di nuovo hardware e nuovo
software, permette di realizzare un sistema di controllo universale per i robots
industriali, rigenerandone l'operatività con l'introduzione di una sorta di
"capacità riflessiva". Alla macchina, attualmente configurata come una
struttura cinematica e dinamica complessa integrata di tutto il repertorio elettrotecnico,
elettronico e softwaristico convenzionale, viene innestata un’ulteriore fase di
"intelligenza": un fronte profondo costituito da "realtà virtuale"
(EMULAZIONE) sul quale va imprimendosi e poi riflettendosi la "realtà concreta"
sotto forma di stimoli sensoriali e comandi attuatori.
Il modello di Olocontrollo Emulativo
Il modello usato è composto da una macchina completa della sua
struttura cinematica e da una corrispondente ricostruzione virtuale all’interno di
uno spazio virtuale ad n dimensioni. Questi due oggetti (il concreto ed il
virtuale) sono separati da una "parete elettronica" (Olocontrollo), che da un
lato presenta caratteristiche concrete ed è collegata alla macchina concreta con una
serie di canali di ingresso (sensori) e di uscita (attuatori), mentre dall’altro lato
è collegata alla macchina virtuale con una serie di canali di ingresso (sensori) e di
uscita (attuatori) virtuali. Olocontrollo è la sezione che realizza pienamente le
trasduzioni fra la parte fisica e quella virtuale dei singoli canali nelle due direzioni
(reversibilità).
La funzionalità del modello è tale che una qualunque modificazione in uno dei due
ambienti, attraverso i canali, si riflette nell’altro che è così costretto ad
inseguirlo.
Dall’ambiente all’emulatore
L’architettura parallela del sistema è tradotta nella
realizzazione di una moltitudine di canali fisici che rappresentano i vettori di ingresso
del sistema intelligente. Ogni canale fisico ha associata una variabile di controllo. I
numerosi canali di ingresso disponibili possono essere utilizzati da altrettanti sensori
d’ambiente (da quelli di visione con CCD a quelli LASER, dai fine corsa ai sensori di
prossimità o a quelli ad Ultrasuoni). L’emulatore, nel suo interno, ha ricostruito
virtualmente l’ambiente esterno completo delle variabili interessanti il processo
produttivo (spazi, macchine, stati fisici, ecc.), nonché l’insieme virtuale dei
canali fisici di ingresso e i collegamenti fra canali virtuali e canali fisici. Le
modificazioni dinamiche ambientali, attraverso il fronte costituito dal sistema sensoriale
e attraverso l’insieme virtuale dei canali fisici, entrano nello spazio emulato del
sistema e, imprimendosi nel suo interno, lo aggiornano continuamente. L’emulatore
acquisisce una piena conoscenza del mondo circostante e dei suoi aggiornamenti.
Dall’emulatore all’ambiente
L’emulatore, nel suo interno, ha ricostruito anche
l’insieme virtuale dei canali fisici di uscita e i relativi collegamenti. Il fronte
dei canali di uscita rappresenta l’insieme dei comandi attuatori del sistema verso
l’ambiente. Ogni canale fisico ha associata una variabile controllata. L’insieme
delle variabili controllate costituisce l’insieme dei vettori di uscita che
determinano le modificazioni dell’ambiente concreto.
L’indipendenza tra le diverse variabili
Quando un vettore entra nel sistema usando una specifica
connessione di ingresso, viene trasformato nel corso del suo passaggio fino alla
connessione di uscita.
Ogni canale fisico è caratterizzato dall’assenza di accoppiamenti di vario genere,
che rappresentano i disturbi al sistema, e dalla totale indipendenza tra le diverse
variabili di controllo. Il sistema di controllo finale, che considera in sé il processo
stesso da controllare, risulta essere disaccoppiato, nel senso che ogni variabile di
uscita del sistema è influenzata solamente dalla propria variabile di ingresso o di
controllo e non da altre. In sostanza, ogni variabile di ingresso controlla la propria
variabile di uscita.
La dinamica del mondo emulativo
L’ambiente concreto, come già accennato, si affaccia
verso Olocontrollo con un piano di sensori che producono di fatto un fronte di segnali che
nel loro insieme trasferiscono la sintesi dello stato istantaneo dello stesso ambiente
concreto. Ad ogni variazione dello stato concreto si avrà una variazione del fronte che,
attraverso Olocontrollo, raggiungerà gli ingressi virtuali all’Emulatore ove si
coniugheranno con un primo livello di modelli virtuali molto semplici (minimi termini),
ognuno dei quali, rappresentando il singolo sensore, verrà aggiornato allo stato attuale
dei sensori concreti. Avremo così una condizione di costante aggiornamento
all’uguaglianza (inseguimento unidirezionale) tra il fronte di uscita del concreto
con il fronte di ingresso del virtuale; in tal modo otteniamo lo svincolo (liberazione)
dal concreto stesso per poter vivere nel solo virtuale i processi che seguiranno.
Proseguendo verso l’interno dell’Emulatore, troviamo un piano successivo nel
quale sono definiti altri modelli virtuali costituiti dall’aggregazione dei
precedenti e rappresentanti altrettanti oggetti funzionanti del concreto. Questa volta, il
fronte di segnali che partono dal primo livello conduce all’aggiornamento dei modelli
del livello successivo (un asse è in una nuova posizione, un cilindro pneumatico è al
fine corsa, una elettrovalvola oramai è chiusa, un laser è acceso, ecc.).
Passando per piani o livelli successivi, si arriva agli oggetti terminali quali fresa,
pezzo da lavorare o manipolare, caustica laser, cianfrino, pinza, ecc. Tutti gli oggetti
terminali sono aggiornati alla realtà concreta attuale.
Avendo, nel frattempo, costruito un altro modello di quegli stessi pezzi in una condizione
o stato diverso e confrontandolo con il modello proveniente dalla realtà, troverò come
risultato una serie di differenziali che andranno a costituire un fronte di riflesso verso
il concreto. Questo nuovo fronte, generato dal confronto, attraverserà piani di
disaggregazione fino ad Olocontrollo per poi entrare verso gli attuatori. Le azioni
conseguenti determineranno un risultato tale che la configurazione concreta uguagli la
nuova configurazione voluta e disegnata.
Da qui riparte un fronte di stati verso l’Emulatore attraverso Olocontrollo per
ricostituire una nuova fase di inseguimento all’uguaglianza.
Sintesi sul riflesso dinamico
Proprietà caratteristica dell’emulatore è, quindi,
quella di poter riversare contemporaneamente due o più scenari diversi all’interno
dello spazio virtuale.
Ipotizziamo quindi di aver rilevato l’ambiente attraverso il sistema di percezione
sensoriale della macchina e di averlo ricostruito virtualmente.
Ipotizziamo, inoltre di riversare nel sistema, in un istante successivo, un secondo
scenario identico al precedente, con un fronte di ingresso identico al fronte precedente.
I due scenari virtuali si trovano in equilibrio in quanto la differenza fra i due fronti
corrispondenti è nulla. I canali sono liberi.
Ipotizziamo ora di modificare uno dei due scenari virtuali o apportando modifiche
all’ambiente esterno o forzando all’interno uno scenario costruito con strumenti
informatici convenzionali (programmi, tastiera, mouse).
Ora, i due scenari virtuali non sono più in equilibrio in quanto presentano differenze
che si traducono (interferenze) in segnali inviati lungo i canali virtuali di uscita e poi
lungo quelli reali. I relativi comandi attuatori interverranno sullo scenario reale
modificandolo.
Gli aggiornamenti indotti sull’ambiente dai comandi attuatori del sistema rientrano
in esso attraverso il proprio sistema di percezione. Si innesta così un riflesso dinamico
di stati che realizza nel sistema quella sorta di "capacità riflessiva" di cui
abbiamo parlato in precedenza. In altre parole, la realtà concreta e quella virtuale
emulativa sono legate da una legge che tende all’uguaglianza o, meglio, di
inseguimento reciproco, mediante la quale qualunque modificazione in uno qualsiasi degli
ambienti, attraverso il riflesso dinamico, si riflette nell’altro. Ovvero, il mondo
della "realtà concreta" si avvicina sempre più, fino ad eguagliarlo, al mondo
della "realtà virtuale" dove si trova fin dall'avvio anche la condizione
"obiettivale" (lo scenario costruito con strumenti informatici).
In questo modo, la "macchina", completata della sua nuova sezione intelligente,
autovaluta di volta in volta qualitativamente le proprie azioni verso un obiettivo ad essa
assegnato.
L’"autonomazione"
Un apparato così costituito trasforma l'attuale standard
convenzionale degli apparati di controllo delle macchine da "itineranti
preprogrammati" ad "autodeduttivi". Si passa così dal sistema detto
"automazione" ad un sistema da noi definito "autonomazione".
Cioè, con "l'automazione" è necessario preprogrammare la "macchina"
registrando in essa il dettato, punto per punto, delle sue azioni che poi,
"automaticamente" e "rigorosamente", ripete tutte le volte in eguale
maniera. Il sistema di tipo obiettivale non ha bisogno di conoscere preventivamente le
operazioni elementari necessarie per raggiungere l’obiettivo, cosa peraltro
necessaria nei sistemi convenzionali, non ha bisogno della completa e preventiva
conoscenza del processo da controllare.
In questo caso con "l'autonomazione" basta descrivere alla "macchina"
il solo obiettivo: essa provvede "autonomamente" ad organizzare e, quindi, ad
utilizzare le proprie risorse per raggiungerlo, anche attraverso il superamento di
eventuali ostacoli o condizioni estemporanee impreviste.
La modularità
La struttura parallela di Olocontrollo Emulativo e la
formazione dei piani di trasduzione e di interferenza, che possiamo considerare
verticalità del sistema (concreto/virtuale/concreto/virtuale ecc.) permette di
moltiplicare il numero dei canali nella dimensione orizzontale. Tale caratteristica
definisce la modularità intrinseca di Olocontrollo Emulativo. Ciò permette di
considerare una macchina complessa come un gruppo di canali
ingresso/uscita/ingresso/uscita. Ovvero, ad una macchina con n ingressi, gestita da
Olocontrollo Emulativo, possono essere aggiunti altri canali od addirittura altre
macchine, coi loro canali, senza che ci sia alcun rallentamento nel processo di
inseguimento.
Concludendo, si giunge a definire che i fronti costituiti nel concreto dal piano delle
interferenze operazionali (utensile che interferisce sul pezzo in lavorazione) e nel
virtuale dal piano ove avviene la generazione dei differenziali di comando, costituiscono
le superfici riflettenti adattative di una "cavità risonante" tendente alla
stabilizzazione istante per istante.
Esempi di alcune macchine realizzate e corredate da Olocontrollo
Emulativo
A cominciare dalle prime espressioni tecnologiche di
Olocontrollo Emulativo e durante tutte le fasi del suo sviluppo, è stato particolarmente
curato che esso fosse accompagnato parallelamente da un processamento industriale che
rendesse costantemente sotto controllo l'applicabilità e la fruibilità. Fin dagli anni
"ottanta" questa metodologia operativa ha permesso l'ottenimento di una chiara
visione delle esigenze presenti e future provenienti dall'evoluzione tecnologica del
mercato. Inoltre, questo modo di procedere ha permesso di produrre con metodi industriali
una sorta di inseguimento applicazionale. D'altro canto, le ingenti somme di danaro e le
risorse necessarie alla ricerca ed allo sviluppo che giungesse fino al mercato, non
potevano essere reperite all'interno delle strutture ENEA. In ciò, siamo stati
accompagnati costantemente dalla partecipazione, sia economica che in risorse tecniche,
umane ed organizzative, da partner industriali. Ogni fase di avanzamento dello sviluppo di
Olocontrollo Emulativo ha dato luogo, di fatto, ad una o più applicazione industriale
finita. Di volta in volta, il Partner Industriale coinvolto, ha prodotto una macchina, un
apparato, un servizio, che un cliente ha acquisito ed utilizzato. Proprio tali
acquisizioni da parte di utilizzatori finali, ha reso possibile i movimenti di capitali
necessari allo sviluppo.
Nel quadro generale dell'organizzazione, una nota importante è costituita dal rapporto
tra le quantità di risorse umane disposte da ENEA e quelle disposte dai vari Partner
coinvolti. Questo rapporto risulta essere mediamente di "uno a dieci", con
picchi di "uno a quindici".
Con questa metodologia, intendiamo procedere ulteriormente, attraversando le ulteriori
tappe della ricerca e degli sviluppi necessari.
Di seguito citiamo conclusivamente alcuni esempi di applicazioni
industriali ultimamente realizzate. Da ricordare che tali avanzamenti hanno nel loro
interno e necessitano di quanto si va progredendo nella ricerca teorica e di laboratorio.
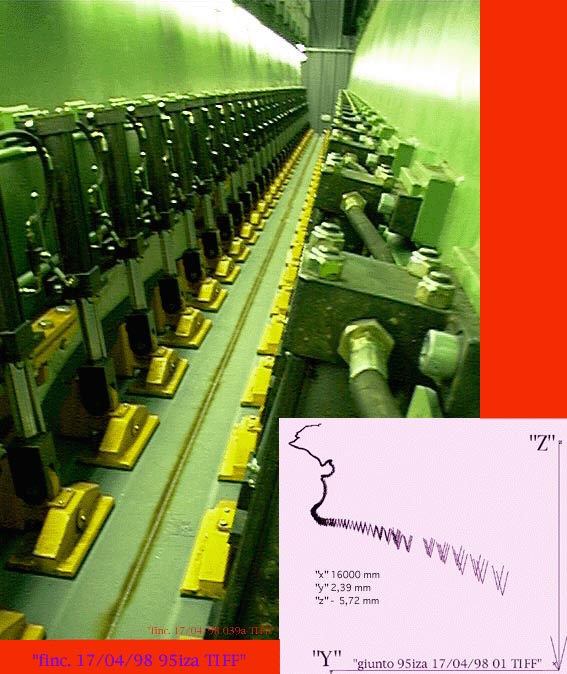
 Macchina Laser per la saldatura di lamiere per la
cantieristica navale controllate con anello visivo per l'inseguimento del giunto di
saldatura di lunghezza fino a 16 metri. La macchina è attualmente in fase di inserimento
nella catena di produzione nella linea "Grandi Navi da Crociera" nei Cantieri
Fincantieri di Monfalcone. Macchina Laser per la saldatura di lamiere per la
cantieristica navale controllate con anello visivo per l'inseguimento del giunto di
saldatura di lunghezza fino a 16 metri. La macchina è attualmente in fase di inserimento
nella catena di produzione nella linea "Grandi Navi da Crociera" nei Cantieri
Fincantieri di Monfalcone.
In figura: Cordone di Saldatura (16 metri di lunghezza)realizzato con l'andamento
del giunto di saldatura rilevato con il dispositivo di visione artificiale
"visio".
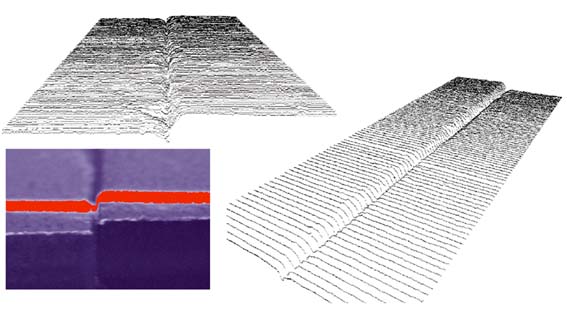
 Esempio di virtualizzazione di giunti di saldatura Esempio di virtualizzazione di giunti di saldatura
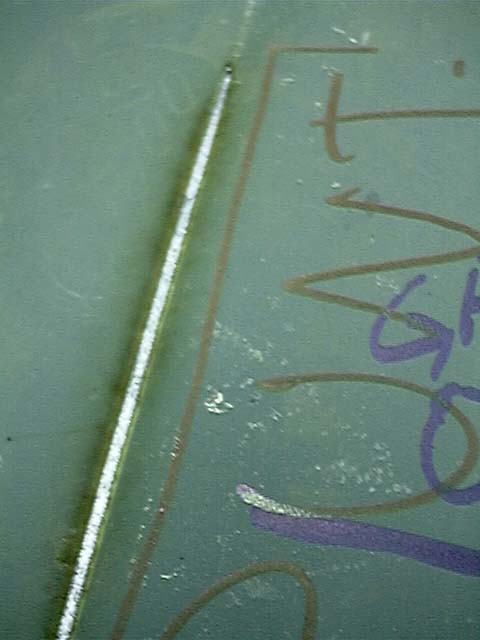
 Porzione di saldatura realizzata Porzione di saldatura realizzata
 Macchina Laser Fincantieri mentre lavora Macchina Laser Fincantieri mentre lavora
 Macchina Laser Fincantieri vista dall'esterno Macchina Laser Fincantieri vista dall'esterno
 Transfer a Sette Centri di Lavoro più Carico e Scarico con manipolatore guidato da visione artificiale "visio".
Complessivamente 44 assi. Transfer a Sette Centri di Lavoro più Carico e Scarico con manipolatore guidato da visione artificiale "visio".
Complessivamente 44 assi.
 Dallo "schizzo" del pezzo al
suo "virtuale" con visualizzazione resa con "rendering" Dallo "schizzo" del pezzo al
suo "virtuale" con visualizzazione resa con "rendering"
 Puro "virtuale" realizzato con lo strumento di virtualizzazione di Olocontrollo Emulativo Puro "virtuale" realizzato con lo strumento di virtualizzazione di Olocontrollo Emulativo
 Macchina per la formatura degli "Stent Coronarici" a partire dal filo di acciaio inossidabile Macchina per la formatura degli "Stent Coronarici" a partire dal filo di acciaio inossidabile
 Stent chiuso all'uscita della macchina Stent chiuso all'uscita della macchina
 Stent espanso come quando nel vaso sanguigno di destinazione Stent espanso come quando nel vaso sanguigno di destinazione
|